Aligning Images With 3D Data¶
The pixels of a camera’s left sensor images can be aligned with the structured 3D data in the disparity and point map.
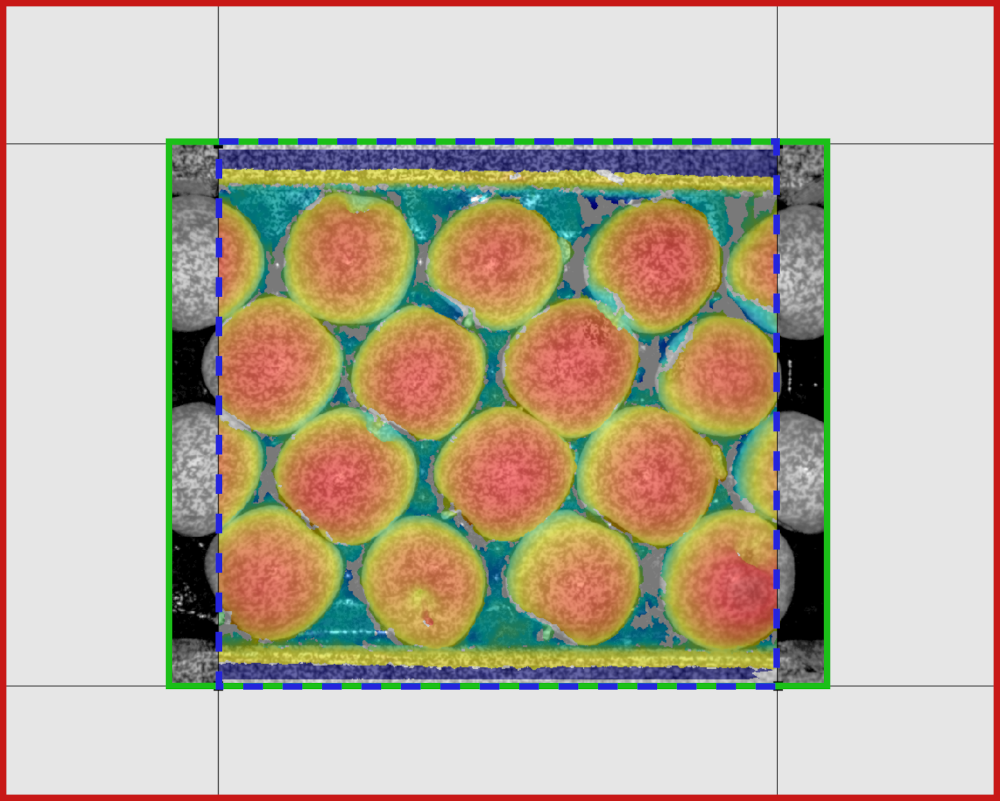
Different images and 3D data of a camera as visualized in NxView.
The image above contains different images produced by the camera. All of these images have the same pixel size. This means that they can be overlayed and the corresponding data in different images are at the same pixel positions if the offsets between them are taken into account.
- Red
The complete left rectified image without any area of interest.
- Green
The left rectified image with the area of interest applied. The left rectified texture image always has the same dimensions and offset as the rectified image.
The offset to the red image is given by the top left position of the area of interest.
The area of interest would take up the entire width of the red image if FullWidth is enabled.
- Blue
3D data from DisparityMap, PointMap and Normals, which are represented as structured images with short or float pixels. All of these images have the same pixel layout.
The 3D data images always has the same height as the rectified images (green).
They can have an offset in the x-direction relative to the green image, which is given by the DisparityMapOffset node. This offset is usually zero unless
ClipToAreaOfInterest is enabled or
the camera is an XR-series.
The data can be downsampled compared to the rectified image (green) when disparity map downsampling is enabled. In this case each pixel of the blue image stretches over a window of downsampling * downsampling pixels of the green image instead of a single pixel.