PartFinder¶
The PartFinder command provides all functions for finding CAD models in point clouds. The Function parameter controls what function will be performed.
Note
PartFinder functionality is included in the normal NxLib, but you need a separate license in order to use it. Executing the command without a valid license will result in an error. See the PartFinder guide for more information on how to acquire and activate the license.
Functions¶
Function overview¶
Function description¶
Value of Function parameter |
Description |
Relevant input parameters |
Outputs |
|---|---|---|---|
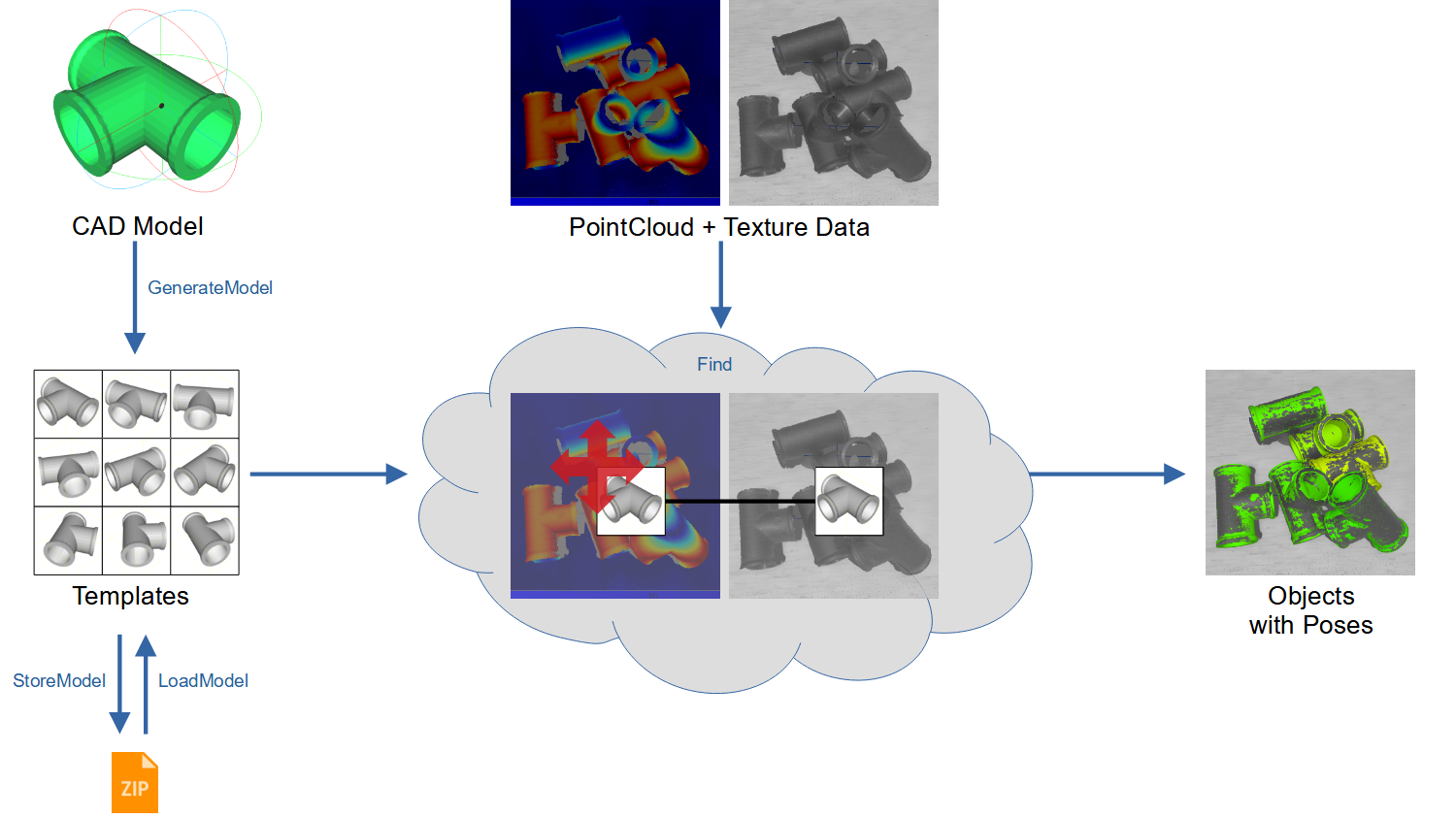
“GenerateModel” |
Take a CAD model as STL or PLY and prepare an internal template based representation of it. This function will sample views of the given STL/PLY model and preprocess each view for the Find function (see below). |
Model, Cameras, Camera, BoundingBox, Viewpoints, RelativeModelSamplingDistance, Angle, AngularResolution, Distance, Symmetries, ComplementViewpoints, CropRegions, ScoreRegions |
|
“ListModels” |
List the currently loaded template models which can be used with the Find or Confirm functions. |
||
“DeleteModel” |
Delete a prepared template model from memory. |
||
“LoadModel” |
Load a preprocessed template model from a zip file or folder. |
ModelId if the model is compatible with the current PartFinder version. GenerateModel containing model parameters in the format of a Models array element otherwise. Supplementary if provided at model creation. |
|
“StoreModel” |
Store a preprocessed template model into a zip file or folder. |
||
“Find” |
Use a template model to find its corresponding STL/PLY object in a point cloud of one or more cameras. |
BoundingBox, ModelId, Camera, Cameras, Cluster/Count, Cluster/MaximumClusterSize, Cluster/Overlap, CoverageDistanceThreshold, ExcludeObjects, RefineCombined/Iterations, CombinedScore, CoverageScore, Target, CUDA/Device, CUDA/Enabled |
Objects, Hypothesis/Count, PointMap, Texture, Camera, Distance, Near, Far |
“Confirm” |
Confirm object locations of a previous execution of the Find function. |
ModelId, Cameras, Camera, BoundingBox, CoverageDistanceThreshold, CombinedScore, CoverageScore, Objects, Target |
identical to Find |
“LoadSupplementary” |
Load only supplementary information provided with a PartFinder model. |
Supplementary if provided. |
|
“ReserveLicense” |
Checks whether a PartFinder license is available and reserves it if possible. The license is kept as long as the NxLib is initialized even when there are currently no active models. |
The command fails with ErrorSymbol “NoLicense” when the license could not be reserved. |